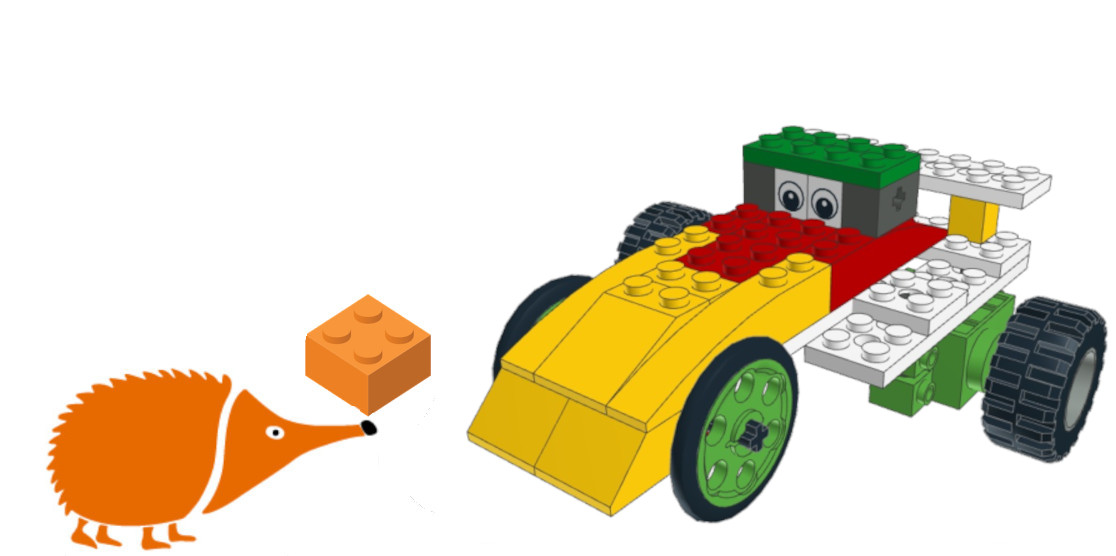
En este nuevo proyecto os proponemos la construcción de un coche que se desplaza mediante dos servomotores de rotación continua y se maneja directamente con el joystick integrado en la EchidnaBlack2.
Siguiendo los principios de esta serie de actividades, el modelo se ha construido con un número reducido de bloques de construcción, buscando la sencillez y la facilidad a la hora de reproducirlo. Se apoya en dos elementos principales:
-
Dos servomotores de rotación continua, uno para cada rueda motriz, conectados a D7 y D8. Esta configuración permite controlar cada rueda por separado, haciendo posible avanzar, retroceder y girar variando la velocidad y el sentido de giro de cada servo.
-
El joystick de la EchidnaBlack2, que actúa como control remoto del vehículo. El eje vertical del joystick se utiliza para controlar el avance y retroceso del coche, mientras que el eje horizontal permite realizar giros.
Con esta programación, el comportamiento del coche es muy intuitivo: al desplazar el joystick hacia delante o hacia atrás el vehículo se mueve en línea recta, mientras que los movimientos laterales permiten girar.
Como en los proyectos anteriores, para facilitar que se pueda reproducir el modelo, se ha creado una guía de construcción paso a paso con todo el montaje del coche, que podéis descargar aquí y seguir fácilmente.
Como siempre, aquí podéis ver un vídeo en el que se muestra el funcionamiento del coche y cómo responde el modelo a los movimientos del joystick.
Aquí podéis descargar el archivo .sb3 para probarlo, modificarlo y experimentar con el proyecto.
Poned unos cables más largos para extender el alcance del control remoto y probad el coche teledirigido. ¡Seguro que os gustará!

{kind=link}
{kind=link}
{kind=link}
Deja tu comentario